Oggi voglio presentarvi un robot molto particolare, pensato e realizzato da me ed il mio grande amico e collaboratore Marco Ferrante. Lo sviluppo e la realizzazione di questo prototipo ci ha tenuti impegnati per più di un anno e al termine, soddisfatti del lavoro ottenuto, abbiamo deciso di brevettarlo presso l’ufficio italiano brevetti e marchi. Con grande entusiasmo, dopo svariati problemi burocratici e tecnici a fine anno 2018 abbiamo ottenuto il brevetto per modello di utilità.

Non contenti di tutto ciò, ad inizio Gennaio 2019 siamo entrati in contatto con una azienda Abruzzese molto all’ avanguardia per la produzione di schede elettroniche: la CMT energia dinamica. Il titolare, entusiasta del nostro progetto, ci ha dato subito fiducia e si è reso disponibile per la produzione di alcuni prototipi di schede utili per lo sviluppo del robot.
Condivido con piacere il sito:
https://www.cmtenergiadinamica.it/
Ecco qui i prototipi da loro fabbricati:
Questo robot è stato concepito per rispondere ad una necessità/problematica in ambito della registrazione e diffusione musicale. Fino ad ora infatti, la microfonazione di una fonte sonora, con lo scopo di essere registrata o semplicemente diffusa, veniva eseguita manualmente in modo tale da riuscire a trovare il miglior suono possibile; ciò implica l’impiego di più persone che effettuino questo compito.
Il robot in questione, si propone come alternativa a tale metodica manuale consentendo una ricerca del suono più precisa ed accurata.
Il robot è costituito da un braccio robotico telescopico motorizzato al cui apice è presente una piastra motorizzata con un supporto per l’alloggiamento di qualsiasi tipo di microfonazione. Il braccio è poggiato su di una base esagonale la quale ospita nella parte inferiore l’intera elettronica. Il movimento è garantito da 3 ruote omnidirezionali che consentono il movimento a 360°.
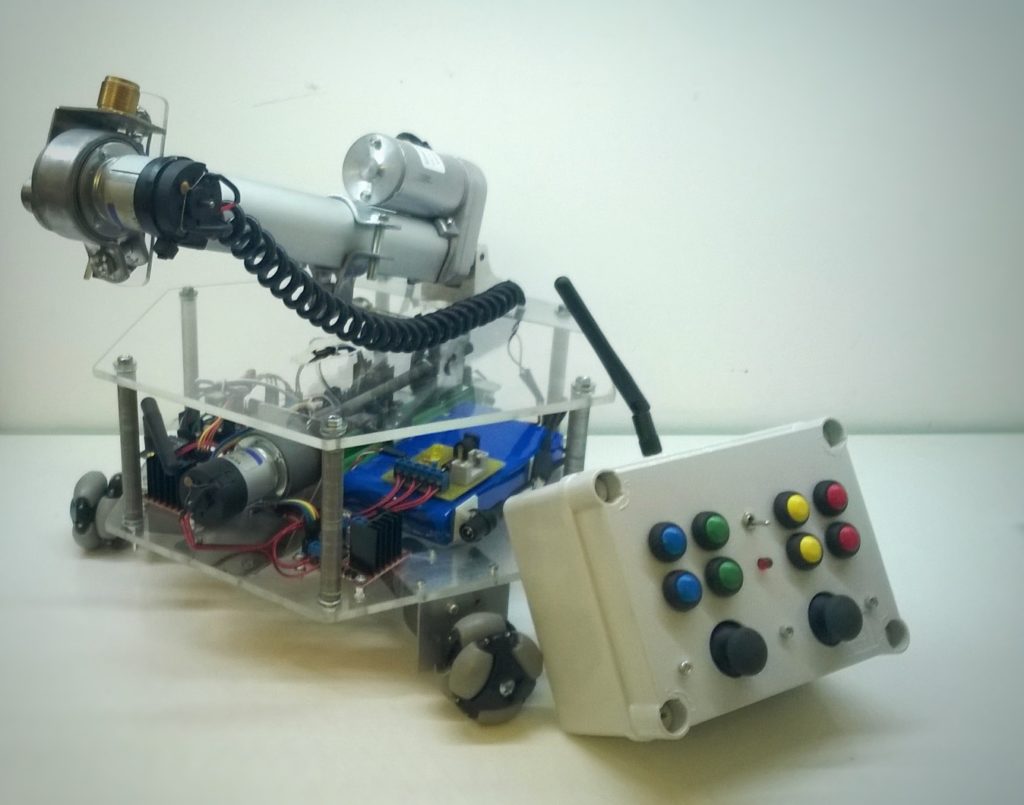
Sulla base è presente anche una videocamera che consente di monitorare il movimento del robot ed effettuare una microfonazione accurata e precisa. Queste peculiari caratteristiche fanno in modo che il robot possa essere comandato a distanza mediante un apposito telecomando costituito da diversi controlli che possono regolare indipendentemente qualsiasi movimento. E’ stato inoltre sviluppato un algoritmo peculiare che permetta al robot di poter effettuare tutti gli spostamenti necessari.
Il robot rappresenta una innovazione in quanto, allo stato dell’arte non si hanno conoscenze sull’ esistenza di apparati che abbiano un movimento microfonico omnidirezionale e che permettano allo stesso tempo di poter monitorare visivamente, mediante l’utilizzo di una telecamera i movimenti.
Il robot può trovare largo uso nell’ ambito degli studi di registrazione, musica live e diverse altre applicazioni, migliorando e velocizzando di molto la microfonazione di diverse fonti sonore. Permette infatti all’ utente di poter monitorare gli spostamenti del robot a distanza utilizzando il telecomando per i movimenti e visualizzando lo spostamento su di uno schermo senza dover abbandonare la propria postazione di ascolto.
Chiaramente si tratta di un prototipo e necessita di un ingegnerizzazione per poter essere prodotto e utilizzato da terzi. Per me e Marco è già un prototipo da “mandare in pensione“, perché sulla base di questo stiamo pensando ad una versione successiva, che lo renderà molto più agevole, meno ingombrante e con altre importanti funzionalità!
Il nostro obiettivo è quello di fare crescere e migliorare il più possibile questo progetto, quindi, siamo aperti a nuove collaborazioni con chiunque fosse interessato!
Valerio Conicella
Lascia un commento